Robots
The majority of the following work was done primarily as a deliverable for a client or company. This focuses on robots for which I’ve designed or co-designed the mechanical structure.
In most cases I was also the lead Software Engineer for the robot as well: delivering a control stack, integrating it and creating applications.
UT-Chariot
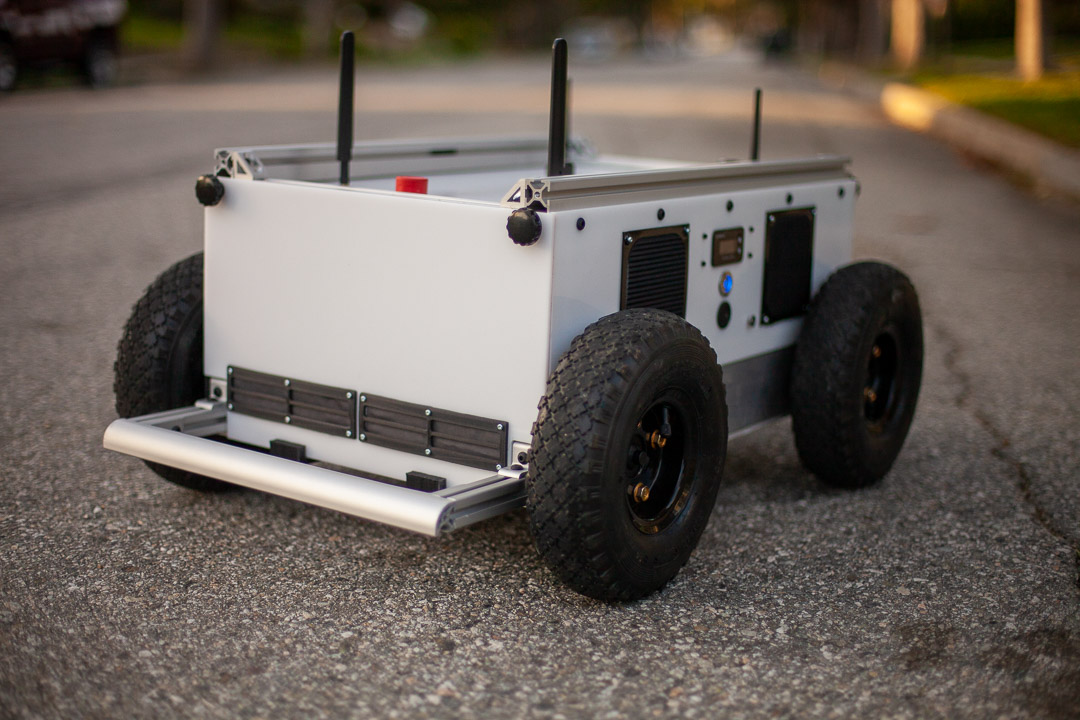
The University of Texas at Austin’s Autonomous Mobile Robotics Laboratory commissioned me to design and manufacture a prototype robot mobile platform with:
- an emphasis on propulsion capabilities
- a modest foot print
- beefy compute including a desktop GPU for vision processing
- active cooling for the Texas summers
- reasonable battery life for experiments in the field
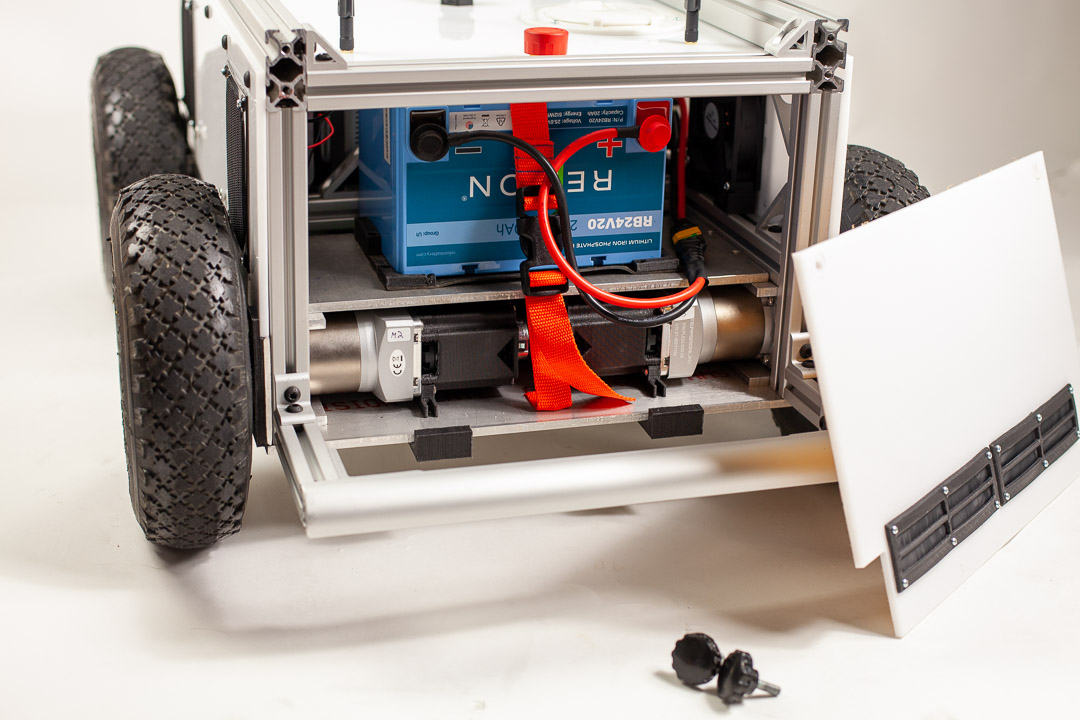
I additionally emphasized accessibility (easy ingress for maintenance), electrical flexibility for future sensor additions, and quality of life features for robot operators.
Robot specs at a high level:
- Accelerations of 3 m/s^2
- Maximum velocity of 4.5 m/s (10 miles per hour)
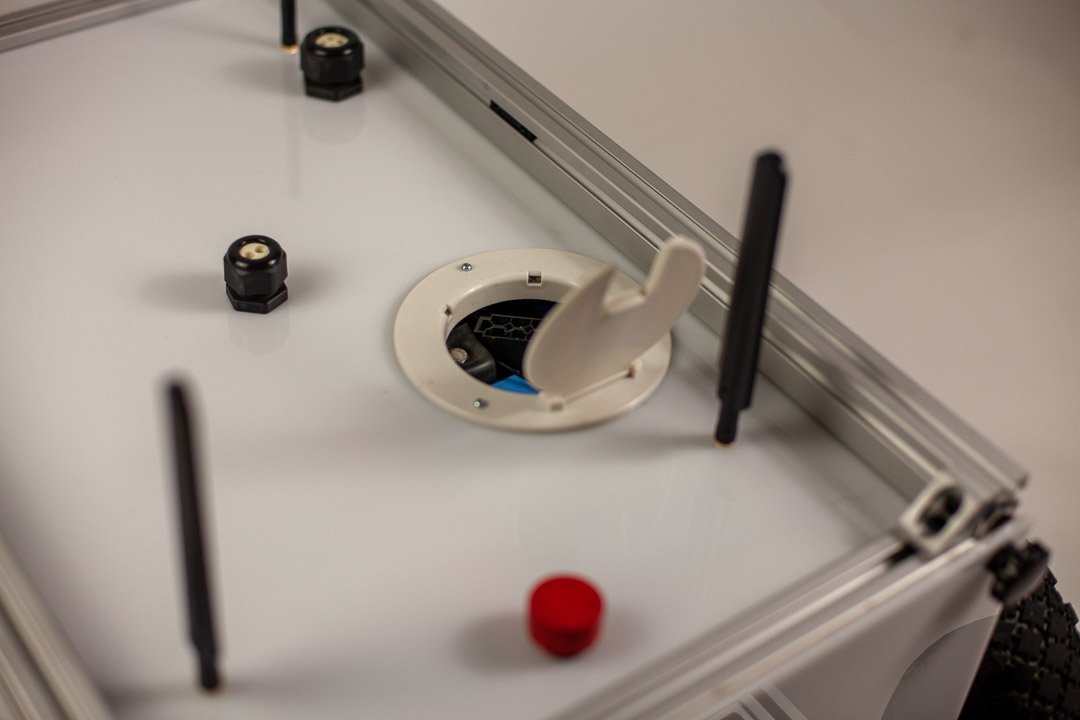
- IP65 rating
- Simultaneous charge and operation; optional shore power for compute with priority
- LAN wired and wireless connectivity
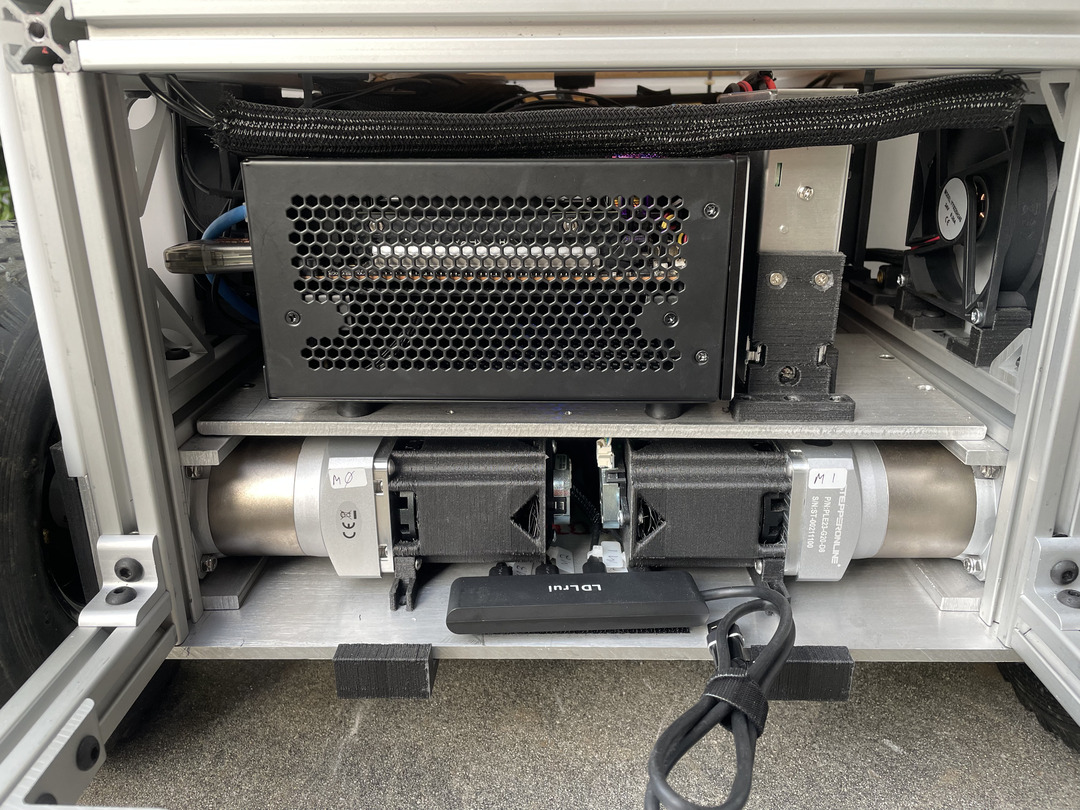
- PC with 32Gb memory, A2000 GPU, Intel i7 11700 and 2 Intel AX200 Wifi NIC




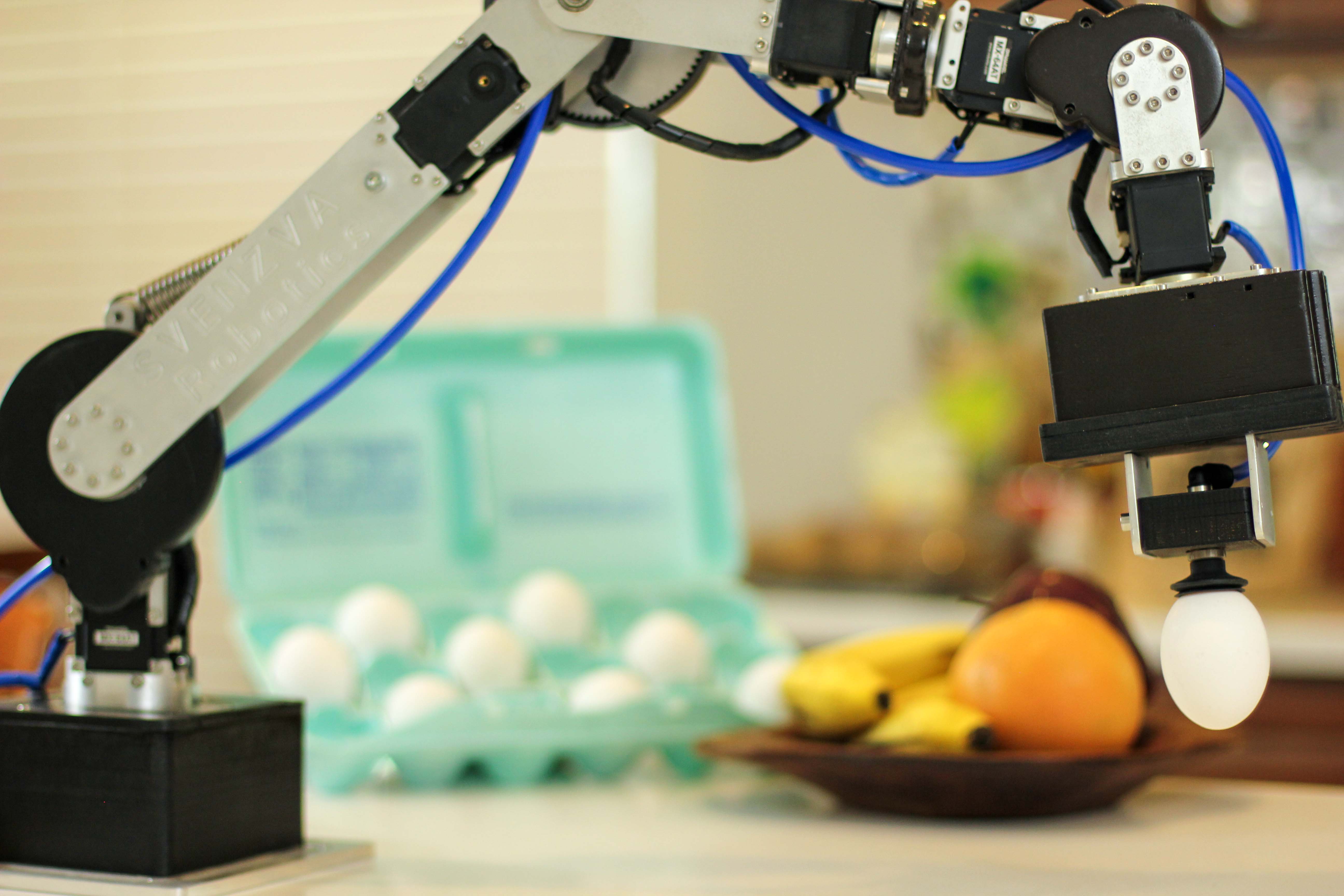
Revel
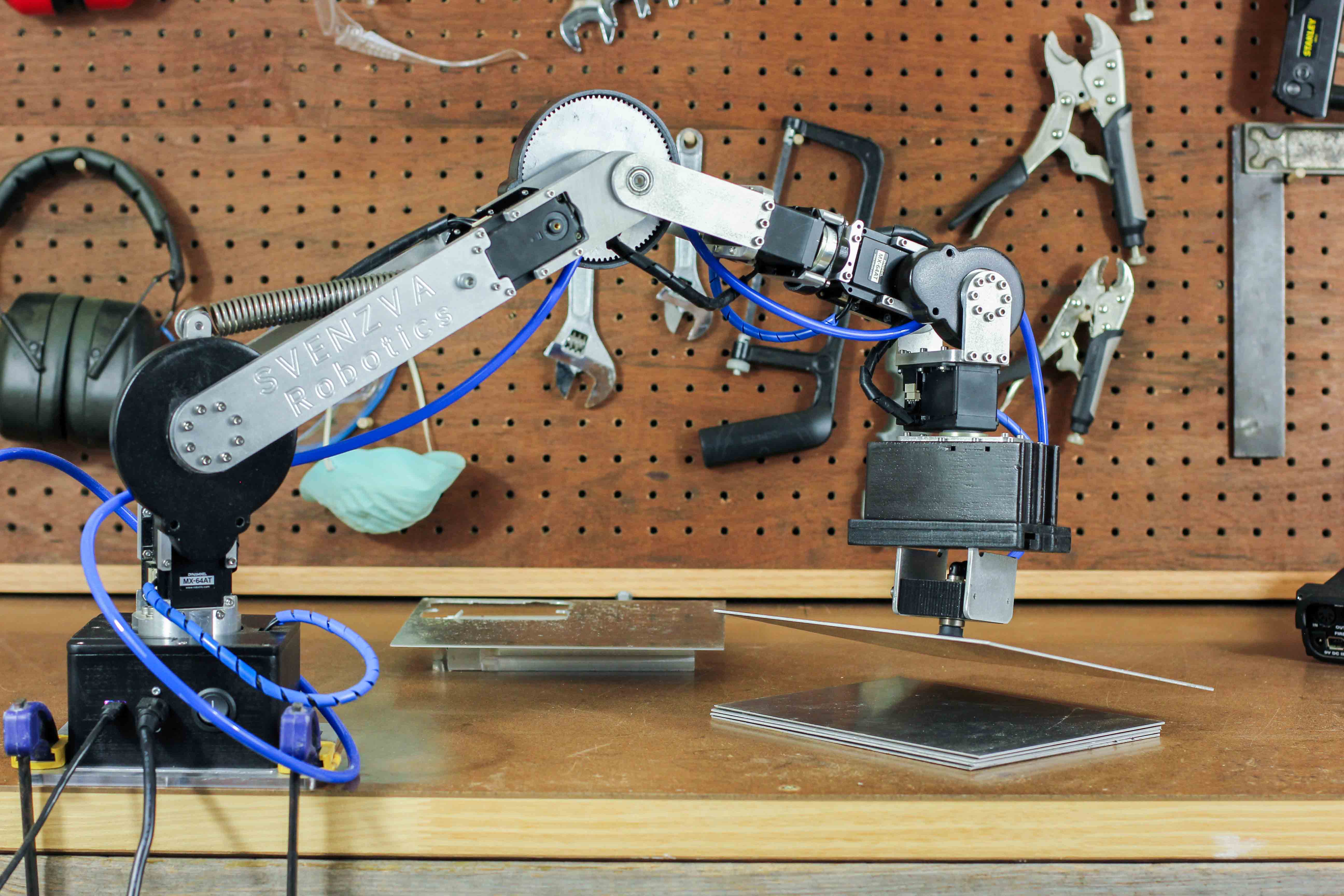
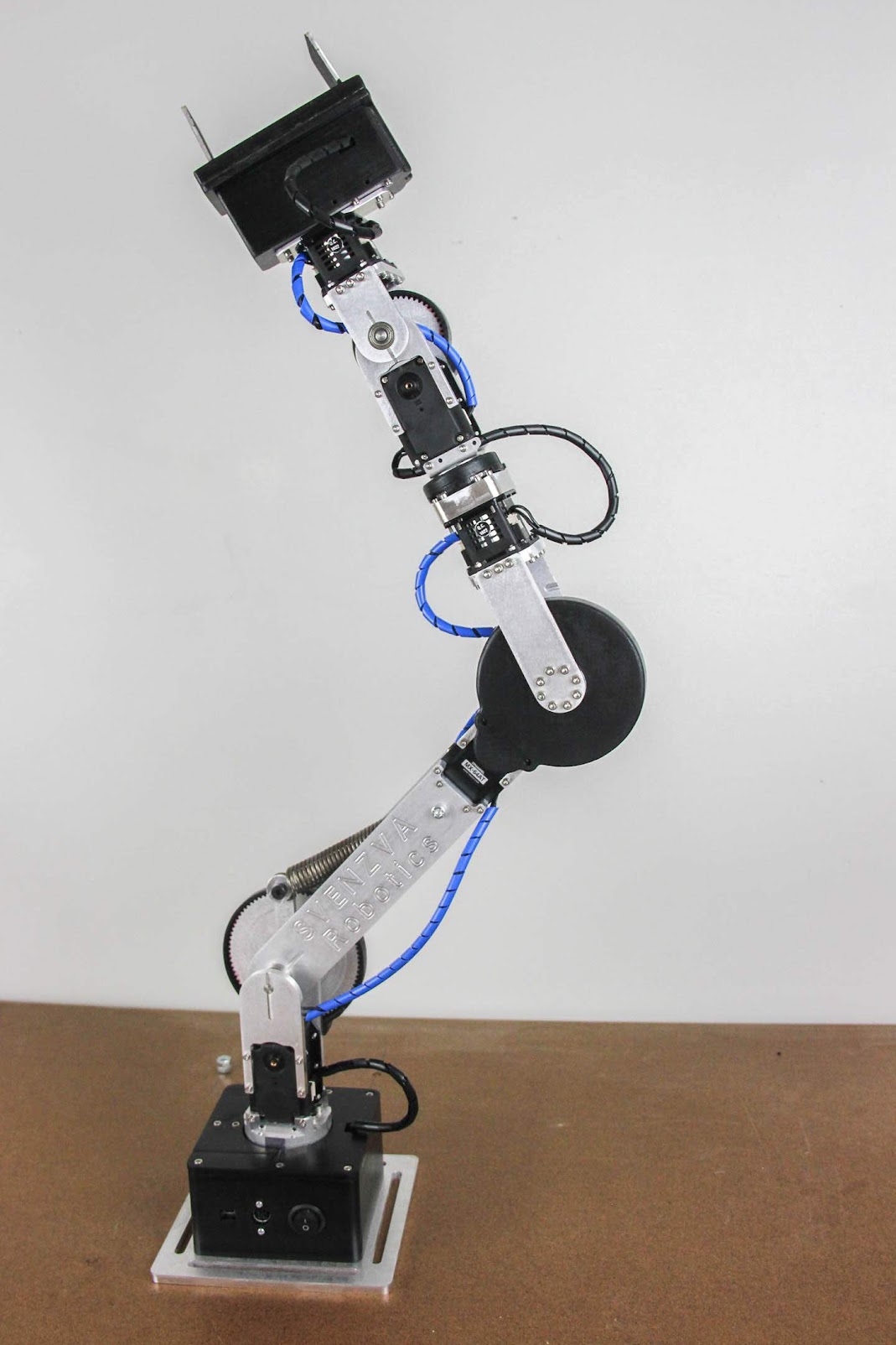
The Revel is a 6 degree of freedom robot arm that was the primary product of Svenzva Robotics, a company I cofounded. It is designed to be affordable but have practical features such as 1.5 kg payload at its 63cm reach.
It was manufactured almost completely in-house and featured a growing collection of accessories- including a hot-swap gripper attachment system. The gripper supported a vaccum gripper system as well as a custom “wand” for the creation of string art.
The basis for Revel was to lower the cost of entry into the “fully featured” commercial space of robot arms. The constraints for development were:
- High payload at full reach (1.5 kg)
- Similar reach as a human (63cm)
- Low price point (Under $6500 USD)
- Easy to use and integrate with existing robot platforms
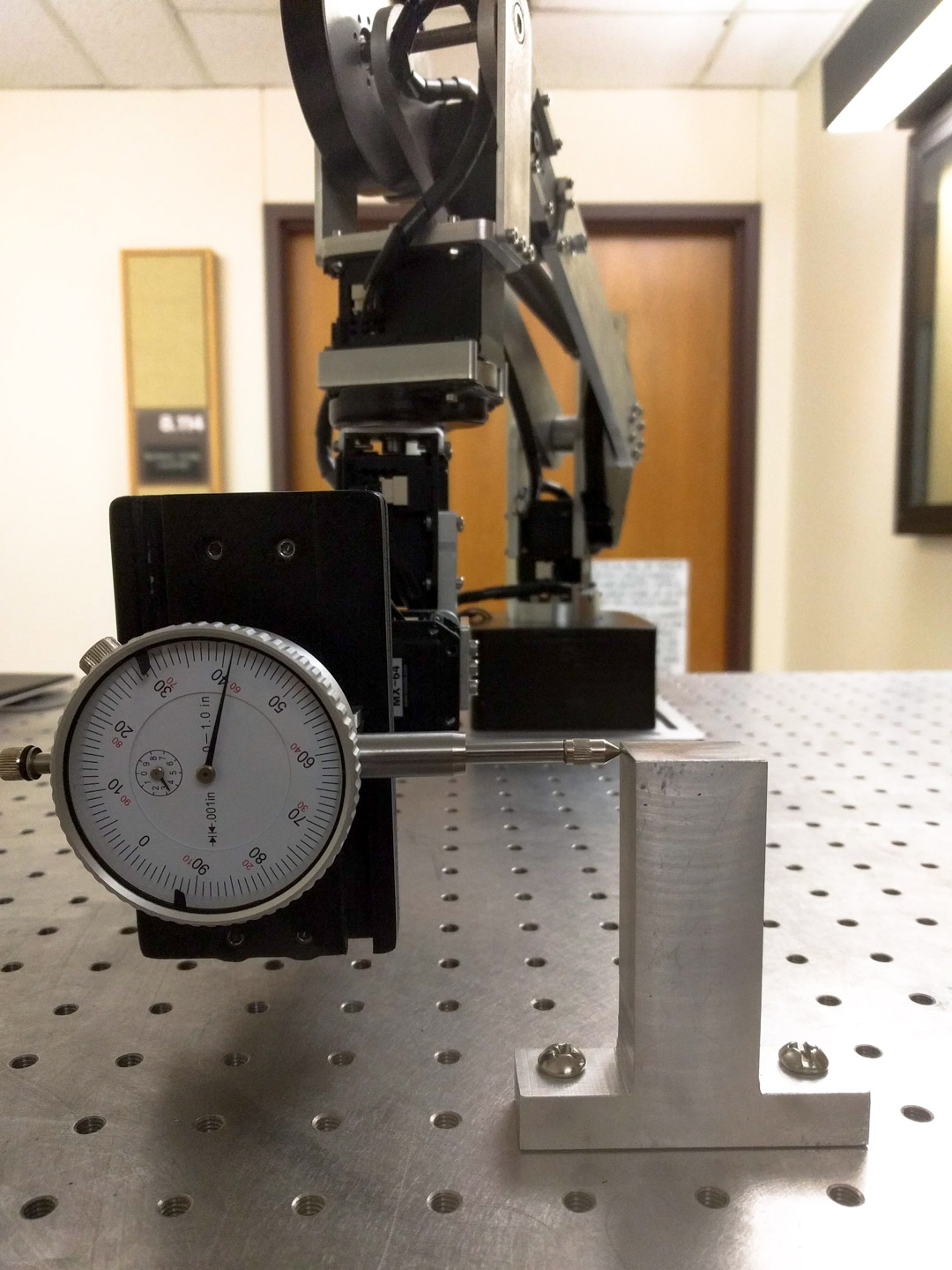
- High accuracy and repeatability

BWIBot
This was the 5th iteration of the BWIBot as part of the Building Wide Intelligence project. This robot utilized a fully enclosed body with a mounted Universal Robotics UR5 arm.
It was designed for mobile manipulation in a semi structured environment alongside humans. It featured LiDAR sensors mounted along the base for primary navigation, and RGB-D sensors behind the mounted arm, for vision.


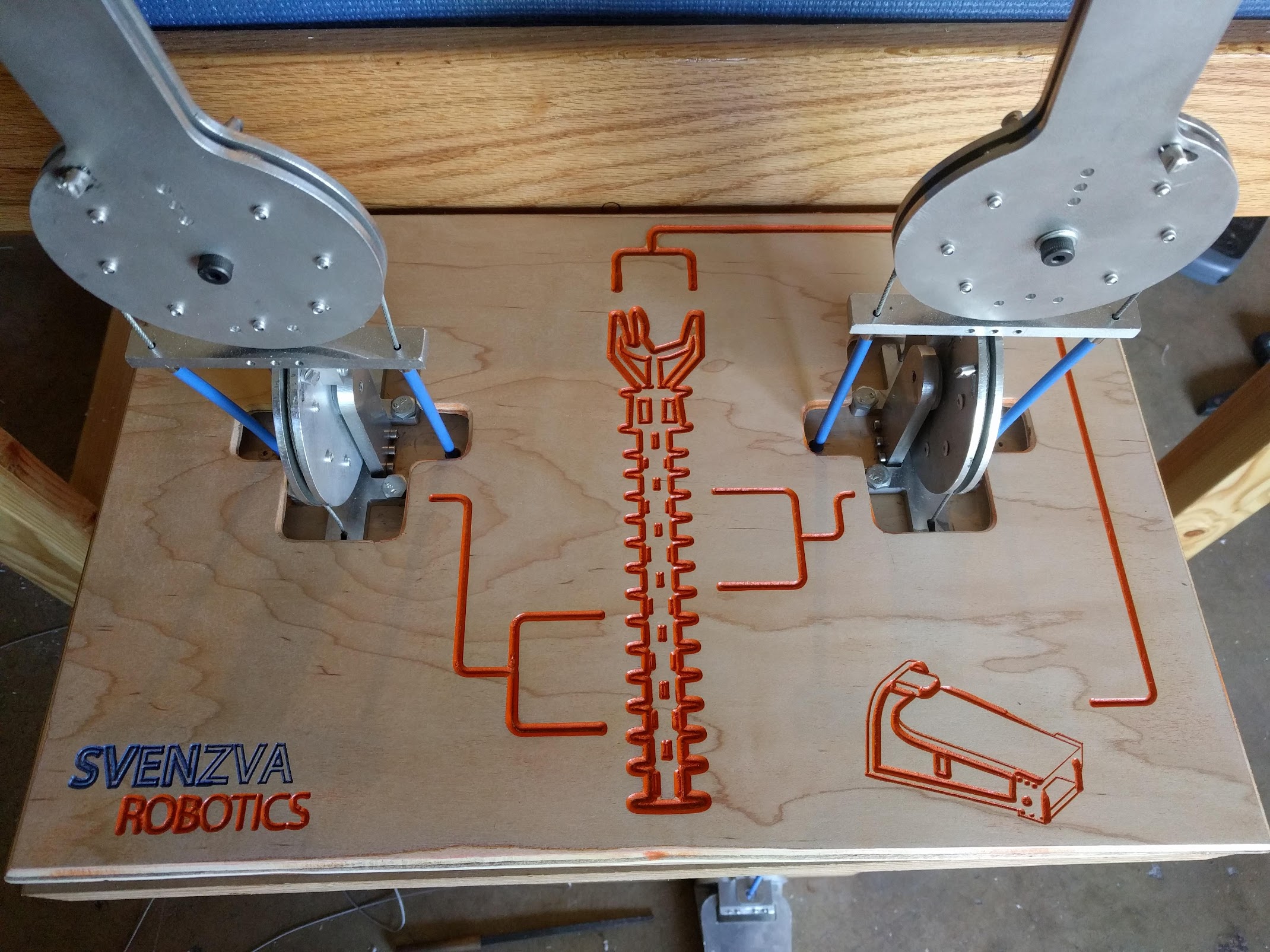
Skylark
Skylark is a fully mechanical, cable driven robot that was designed as an exhibit for a children’s museum. It featured a see-through enclosure to show onlookers how the motion was being driven by the mechanical controllers.